二足歩行ロボットの安定制御に関する研究
ヒューマノイドロボットが人間環境下で作業・動作を行う場合、二足歩行が可能でなくてはなりません。
また、段差、斜面、凹凸面等、様々な場所でその歩行が適応可能であることが重要であり、現在その研究が盛んに行われています。
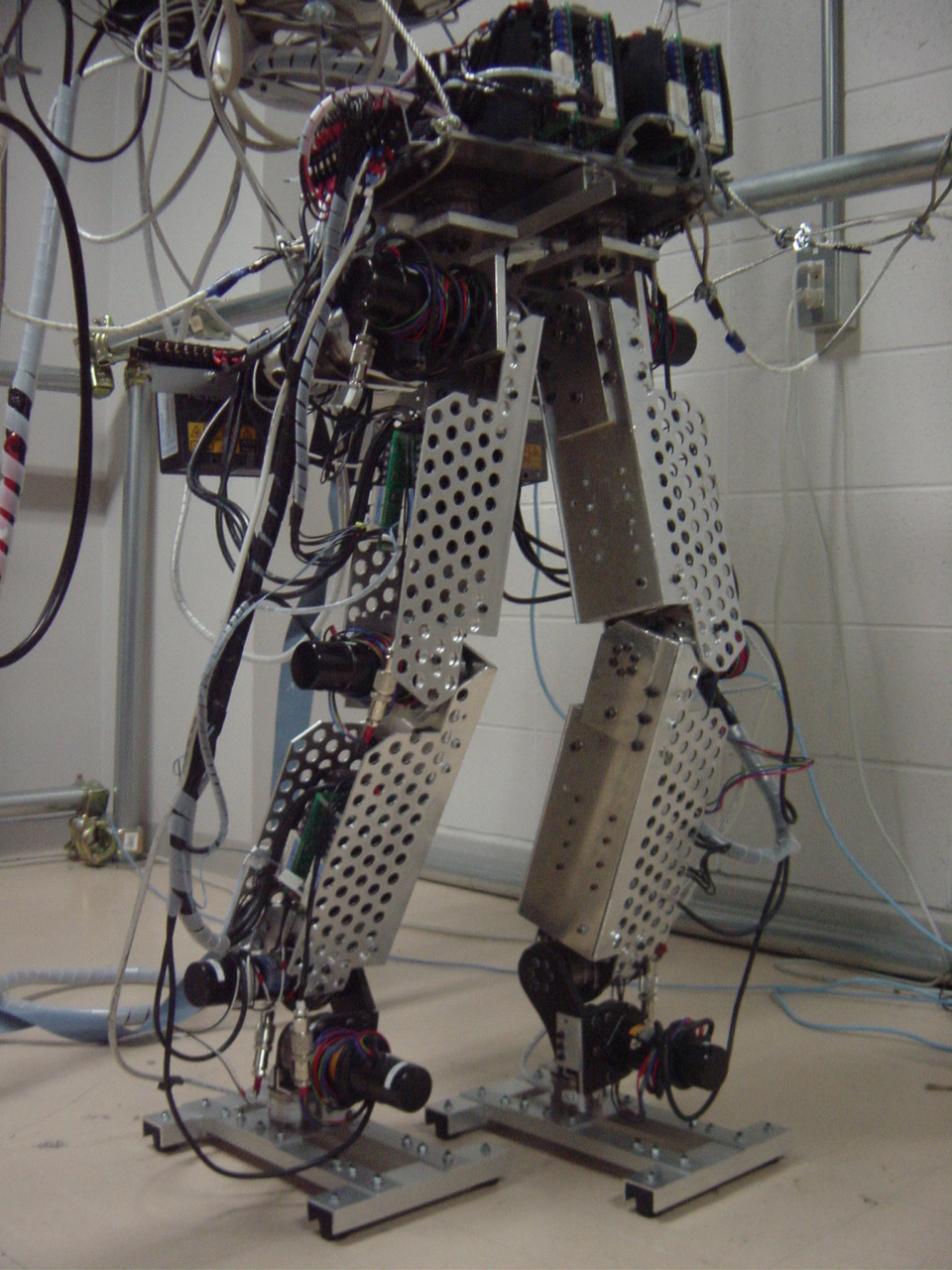
小田研究室では上の写真の全12自由度の二足歩行ロボットを製作し実際に安定歩行に関する研究を行っています。
現在はレーザセンサを用いた床からの情報に基づいて、姿勢の安定化を行った歩行制御を実現しています。
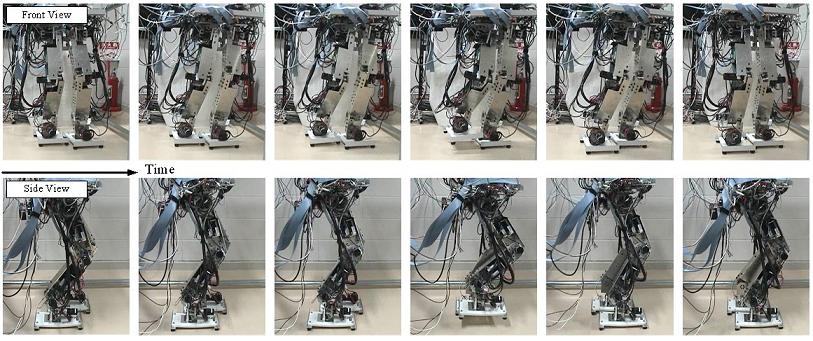
下の写真はこのロボットの歩行動作の連続写真です。
冗長モーションシステムに関する研究

冗長マニピュレータとは、ロボットの作業に必要な自由度(関節)よりもマニピュレータ自身が持つ自由度の方が大きいロボットのことをいう。
このように冗長性を持たせることでマニピュレータは高機能かつ器用な作業が可能となる。
例えば、障害物回避や他のロボットとの協調作業による干渉回避等には非常に有効的である。
しかし、冗長性を持たせることによって制御がより複雑化し困難なものとなる。
小田研究室では、このような冗長マニピュレータを用いて様々な冗長モーションシステムに関する研究を行っています。
*マニピュレータとは腕型のロボットのことです。
自律型/遠隔制御型 移動ロボットに関する研究
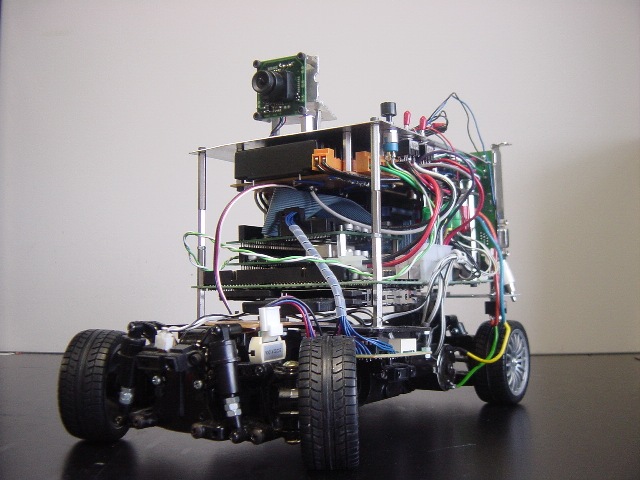

上の写真は自律型/遠隔制御型 移動ロボットの写真です。
自律型移動ロボットとはセンサなどで様々な情報を取得し、ロボット自身が行動を決定することができるロボットのことです。
小田研究室ではこのような自律型移動ロボットの研究を行っています。
また遠隔制御に関しての研究も行っています。
操作はパソコンに取り付けられたコントローラー(ラジコンのハンドル)で行います。
写真のロボットは、このロボット自身の視覚情報を操作者に送ることが可能です。
現在は自律機能の実装を進めています。
現在、車椅子型ロボットの製作を進めている。
大人が乗車可能であり、前部の左右にCCDカメラを実装している。
現在のところ、ジョイスティックによる操作により走行可能であるが、視覚ベースによる操縦支援(パワーアシスト制御)、自立走行、 画像処理によって得たオプティカルフローに基づく自己のモーション認識、障害物等の環境認識の研究を展開している。
視覚センサを用いたモーションコントロールに関する研究

今後、ロボットには人間のように視覚情報に基づいた運動制御が期待される。
しかし、実際にはリアルタイムで視覚情報をフィードバックし、運動を制御するには計算コストの問題など様々な問題を伴うなどが現実です。
小田研究室では、視覚情報に基づいた運動制御を行うために、上の写真のようなマニピュレータ(腕型のロボット)を用いて研究を行っている。
マニピュレータにはPSDカメラ(特殊なLED光源のみ見ることができる)取り付けられており、そのカメラからの情報に基づいて、追従などの運動制御が可能である。
ロボットビジョンに関する研究
人間は視覚情報から様々な物事を判別することができる。
ロボットもカメラから視覚情報を取得することができるが、そのデータ量が膨大であり、また人間のように3次元の情報ではなく、ただの2次元の情報として認識してしまう。
そのためロボットは環境を認識することができない。
この問題を解決するために、画像処理という手法を用いてロボットに有用である情報を獲得することができる。
小田研究室ではオプティカルフローという画像処理を用いてロボットに周囲の環境を認識する研究を行っています。
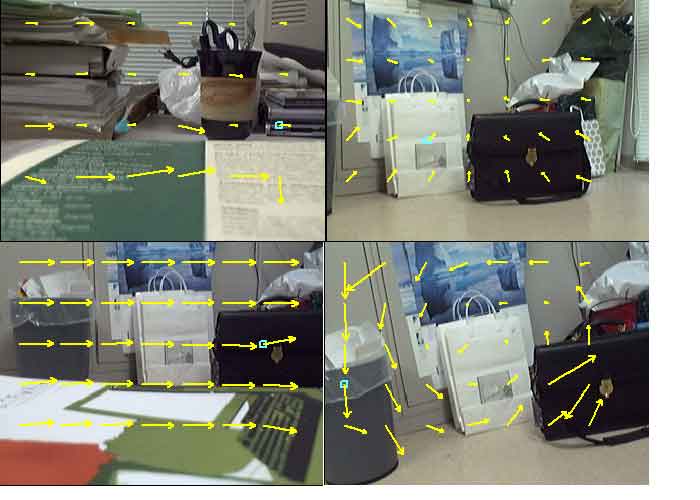
オプティカルフローとは連続の画像を使った光の速度ベクトルである。
上の写真はそれぞれカメラによって映し出された映像の各点がどのような方向、速度で動いているかがオプティカルフローによって導きだされています。